下列选项中,没有用到连杆机构的是?( )
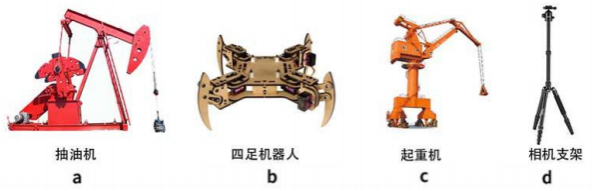
a
b
c
d
直立行走机器人多采用哪种机构?( )
连杆机构
齿轮机构
棘轮机构
凸轮机构
一个小车采用差速运动控制方向,下列说法正确的是?( )
左侧车轮转速大于右侧车轮,小车前行并左拐
左侧车轮转速小于右侧车轮,小车前行并右拐
左侧车轮转速为0,右侧车轮有转速,小车原地左拐
右侧车轮转速为0,左侧车轮有转速,小车原地左拐
关于前轮驱动和后轮驱动说法正确的是?()
前驱的起步加速表现更好
前驱的机械效率更低
后驱容易转向过度
前驱容易转向过度
以下关于重力的说法正确的是?( )
重力的方向无法确定
重力的大小无法计算
重力的作用点在物体的重心
一个小苹果的重力和一个大西瓜的重力无法比较
以下各项中,适合远距离传动的是?( )
带传动
齿轮传动
蜗杆传动
螺旋传动
图中为典型的棘轮机构,分别由哪些构件组成?( )
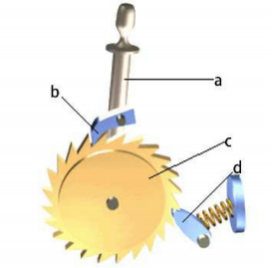
a主动棘爪、b主动摆杆、c棘轮、d止回棘爪
a主动摆杆、b主动棘爪、c棘轮、d止回棘爪
a主动摆杆、b主动棘爪、c止回棘爪、d棘轮
a止回棘爪、b主动棘爪、c棘轮、d主动摆杆
如图曲柄滑块机构,回转体A做圆周运动,滑块B做什么动作?( )
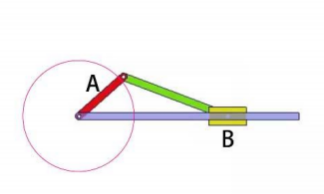
回转动作
在轨道上滑动
上下摆动
固定不动
如果物体在斜面上匀速下滑,则该物体受到的力不包括?( )
摩擦力
拉力
自身的重力
斜面的支持力
如图下列哪项不属于棘轮机构?( )
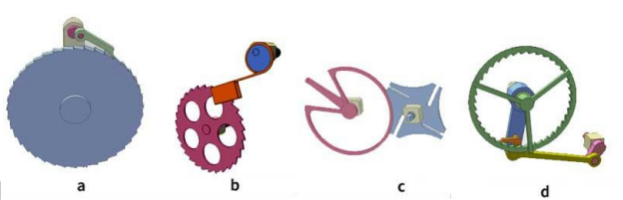
a
b
c
d
关于诸葛亮发明的木牛流马说法正确的是?( )
是工业机器人
是服务型机器人
是军用机器人
是医用机器人
关于平面连杆机构说法错误的是?( )
不易实现较为复杂的运动规律
连杆属于低副机构
制造精度较高,制造相对简单
连杆机构中杆越多,动作越精确
以下著名人物中,提出“机器人三原则”的是?( )
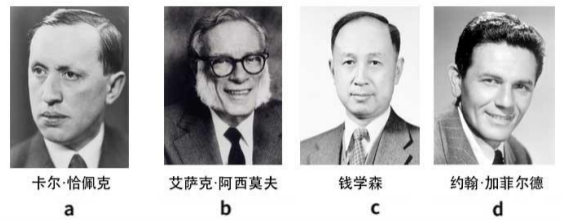
a
b
c
d
关于曲柄滑块机构下列说法正确的是?( )
曲柄滑块机构中曲柄一定是主动件
曲柄滑块机构中滑块一定是主动件
曲柄滑块机构中有连杆起连接作用
曲柄滑块机构中只有曲柄和滑块两个零件
如图关于该槽轮机构说法正确的是?( )
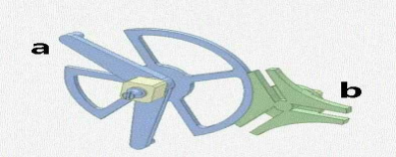
a是主动件
b是主动件
a转动一周,b转动一次
a转动一周,b的转动次数无法确定
以下哪个不是凸轮机构?( )
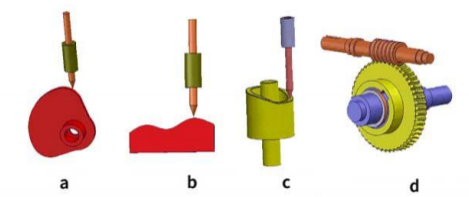
a
b
c
d
以下凸轮机构没有采用几何锁合方式的是?( )
共轭凸轮机构
槽凸轮机构
等宽凸轮机构
弹力锁合凸轮机构
滑杆机构中回转体做什么运动?( )
前后摆动
上下滑动
回转运动
左右移动
以下图片中应用了皮带传动的是?( )

a
b
c
d
以下选项中对皮带传动叙述正确的是?( )
皮带传动必须在同一平面内
皮带传动两轮只能同向转动
皮带传动两轮只能反向转动
皮带传动安装方式可以有半交叉传动
下列齿轮组起加速作用的是?( )
主动轮20齿,从动轮8齿
主动轮20齿,从动轮20齿
主动轮8齿,从动轮20齿
主动轮8齿,从动轮8齿
人体能承受的的最大安全电压是?( )
5V
36V
110V
220V
通常我们将机器人分为几代?( )
1代
2代
3代
4代
以下不属于典型棘轮机构组成的是?( )
主动摆杆
主动棘爪和止回棘爪
棘轮
带圆销的回转体
关于曲柄摇杆机构说法正确的是?( )
曲柄做摇摆动作
摇杆做回转运动
曲柄做回转运动
摇杆在既定轨道上滑动
按照凸轮的形状对凸轮机构分类,不包括下列哪一项?( )
盘形凸轮
移动凸轮
圆柱凸轮
沟槽凸轮
在凸轮机构中凸轮转速的高低决定了()运动的快慢?
滑块
从动件
机架
凸轮
下列说法错误的是?( )
摩擦力的大小与接触面的粗糙程度有关
静止在斜面上的物体一定受到了摩擦力作用
鞋底上有花纹是为了行走时增大摩擦力
汽车轮胎上的花纹是为了减小与地面的摩擦力
下图表现的是机翼模型,当飞机飞行时,迎面吹过来的风被机翼分为两部分,在相同时间内,机翼上方气
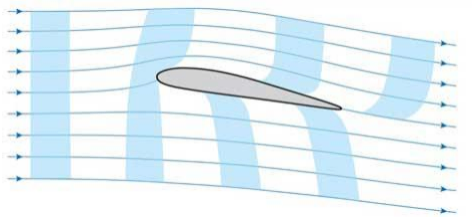
短,慢,小
短,慢,大
长,快,小
长,快,大
下列不属于凸轮机构的从动件的是?( )
尖顶从动件
滚子从动件
三角从动件
平底从动件
凸轮机构主要由哪些部件组成?( )
以下机构中可以不在同一平面内安装的是?( )
关于能量说法正确的有哪些?( )
皮带传动的缺点有哪些?( )
两物体之间产生摩擦力必须具备的条件有哪些?( )
现代机器人已经发展到“智能机器人”时代。( )
汽车轮子上的花纹是为了装饰,没有实际用途。( )
反向双曲柄机构中两个曲柄旋转方向相同。( )
物体发生相对运动时一定产生了摩擦力。( )
蜗轮能够轻易的带动蜗杆。( )
自行车传动方式是皮带传动。( )
工业机器人一定具有说话功能。( )
齿轮传动效率比皮带传动高。( )
使用机械可以省力但不能省功。( )
凸轮机构是一种低副机构。( )
