“机器人三原则”是由谁提出的?( )
美国人艾萨克·阿西莫夫
日本人森昌弘
美国人乔治·德沃尔
中国人苏颂
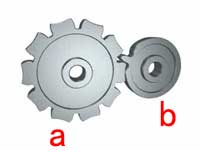
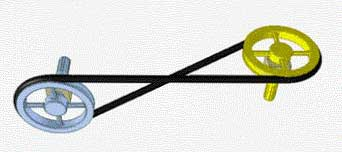
如图关于该机构说法正确的是?( )
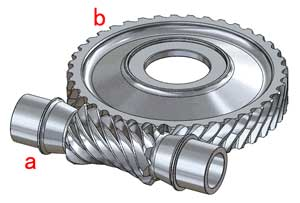
这是齿轮平行啮合
这是链传动
这是皮带传动
a是主动件
如图下列哪个是该传动方式的特点?( )
只能在同一平面内连接
容易打滑
适合远距离传动
动力传递精准
以下适合远距离传动的机构为?( )
平行啮合的齿轮
垂直啮合的齿轮
链传动机构
蜗轮蜗杆机构
以下不属于滑杆机构的部件是?( )
滑块和滑杆
滑轮
回转体
机体
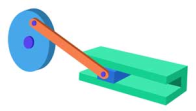
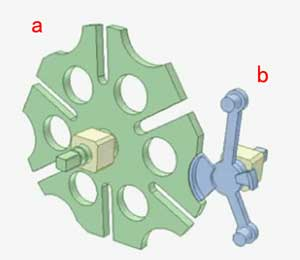
如图该机构中主动摆杆是指?
a
b
c
d
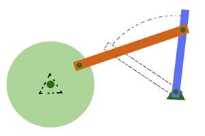
如图该机构动作时,a杆等速回转,b杆左右摇摆,则该机构是?( )
双曲柄机构
曲柄摇杆机构
曲柄滑块机构
双摇杆机构
滑杆机构中回转体做什么动作?( )
回转运动
上下直动
左右摇摆
沿轨道滑动
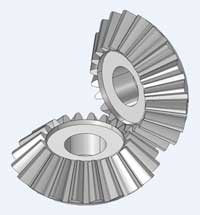
如图关于该机构说法正确的是?( )
a是主动件
这是不完全齿轮机构
这槽轮机构
这是全齿齿轮啮合的机构
下图中哪个是移动型凸轮机构?( )
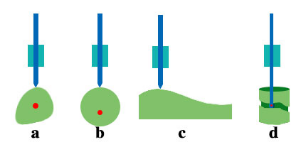
a
b
c
d
如图挖掘机的机械臂主要应用了什么机构?( )

连杆机构
凸轮机构
棘轮机构
槽轮机构
在曲柄滑块机构中,滑块做什么动作?( )
左右摇摆
绕固定点转动
沿既定的轨道滑动
无规律
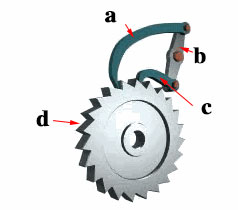
如图该机构为?( )

摩擦式棘轮机构
单动式棘轮机构
双动式棘轮机构
外啮合棘轮机构
如图该机构为双动式单向棘轮机构,其中棘轮是?( )
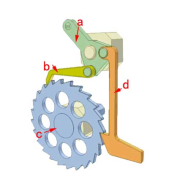
a
b
c
d
凸轮机构中通过弹簧来锁合凸轮与从动件的方式叫做?( )
几何锁合
弹力锁合
拉力锁合
重力锁合
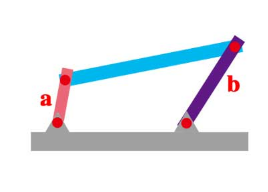
如图该机构为?( )
双曲柄机构
双摇杆机构
曲柄滑块机构
曲柄摇杆机构
如图该凸轮机构采用的锁合方式为? ( )

弹力锁合
重力锁合
几何锁合
摩擦力锁合
如图该机构为?( )
双曲柄机构
曲柄滑块机构
双摇杆机构
棘轮机构
行走的机械腿一般采用的机构是?( )
凸轮机构
齿轮机构
棘轮机构
连杆机构
关于前轮驱动小汽车说法错误的是?( )
发动机一般放在小汽车前部
起步加速比后轮驱动小汽车更好
因为传动轴短,效率比后轮驱动小汽车高
前轮既要作为驱动轮,还要控制方向
一个机器小车,用左右两个电机分别控制左右车轮,左侧电机转速是100rpm,右侧电机转速是50rpm,则此机器人?( )
向前直走
向左前方转向
向右前方转向
原地不动
如图鞋底之所以有花纹是为了?( )

增大鞋底与地面的摩擦力
减小鞋底与地面的摩擦力
更加美观
使脚部舒适
如图向两张纸之间吹气,那么这两张纸如何变化?( )
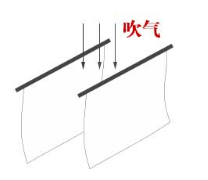
相互靠近
相互远离
不动
任意摆动
如图木块没有受到的力是?( )

重力
下滑力
摩擦力
支持力
关于重力下列说法正确的是?( )
重力大小与物体的质量有关
一个物体的重力与它的形状有关
一个物体的重力与它的颜色有关
一个物体在地球和月球的重力相等
人体最大安全电压是?( )
1.5V
2V
36V
220V
下图为飞机起飞时的机翼示意图,说法正确的是?( )
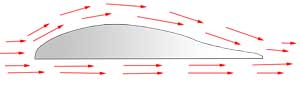
整个机翼受到向下的力
机翼上侧气流速度快
机翼上侧所受的压力为0
机翼下侧所受的压力为0
智能机器人是第几代机器人?( )
第一代
第二代
第三代
第四代
张衡发明 “记里鼓车”用来?( )
计算车行驶路程
表演击打乐器
运输军用物资
指示方位
自行车主要采用了哪种传动方式?( )
皮带平行传动
链传动
皮带交叉传动
皮带半交叉传动
产生滑动摩擦力的条件有哪些?( )
如图关于该传动方式说法正确的是?( )
如图关于该机构说法正确的是?( )
关于曲柄摇杆机构各部件说法正确的是?( )
下列会产生滑动摩擦力的是?( )
“公输子削木为鹊”的典故记载的是空中机器人。( )
大齿轮带动小齿轮转动起减速的作用。( )
齿轮传动只能在同一平面内连接。( )
皮带传动能够精准地传递动力。( )
链传动无法计算传动比。( )
使用“行星齿轮”可以实现装置一边自转一边围绕旋转中心公转。( )
电动机可以将机械能转化为电能。( )
两个不接触的物体之间也有可能产生滑动摩擦力。( )
美国人约瑟夫·恩格尔伯格被誉为“机器人之父”。( )
有一些机械可以省功。( )
