以下传动方式主动轮与从动轮转动方向不同的是?
两齿轮平行啮合
皮带开口传动
链传动
皮带平行传动
如下图所示,该机构为?

摆动平底从动件凸轮机构
摆动滚子从动件凸轮机构
直动尖顶从动件凸轮机构
直动滚子从动件凸轮机构
我们穿的鞋子的鞋底大多数都有花纹,主要是为了?
增大摩擦力
个性设计,更加美观
节省原料,更加环保
减轻重量
下图棘轮机构中,绿色零件为?

止回棘爪
主动棘爪
主动摆杆
机架
如下图所示,该机构为?
摩擦式棘轮机构
外啮合棘轮机构
力锁合凸轮机构
几何锁合凸轮机构
关于下图机械结构各部分的动作,说法正确的是?
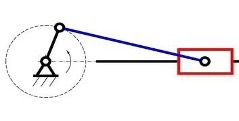
曲柄做摇摆运动
曲柄做圆周运动
连杆做圆周运动
滑块做圆周运动
以下哪个不是皮带传动的常用方式?
平行传动
交叉传动
半交叉传动
弹力传动
下图所示机械是?

钻井机
采油机
打桩机
加气机
关于双曲柄机构,下列说法不正确的是?
双曲柄机构属于铰链四杆机构
双曲柄机构与基座连接的两杆均为曲柄
双曲柄机构中最短杆与最长杆长度之和大于其余两杆长度之和
双曲柄机构两曲柄均做圆周运动
关于滑动摩擦力,以下说法正确的是?
滑动摩擦力跟物体接触面粗糙程度有关
滑动摩檫力小于滚动摩檫力
滑动摩檫力大于最大静摩檫力
滑动摩擦力的大小跟接触面所受的压力无关
齿轮传动的缺点是?
噪声比较大
能精确的传递动力
容易打滑
只能在同一平面内安装
关于“伯努利效应”,下列说法不正确的是?
也叫做“边界层表面效应”
适用于包括液体和气体在内的一切理想流体
飞机飞行运用了伯努利效应
流体速度加快时,物体与流体接触的界面上的压强会增大
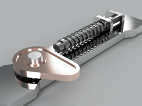
如下图所示,该机构为?
双动式棘轮机构
摩擦式棘轮机构
滑轮
凸轮机构
平面连杆机构构件之间的运动副是下列哪一种?
高副
低副
中副
无法判断
感知型机器属于第几代机器人?
第一代
第二代
第三代
第四代
以下不是带传动缺点的是?
传递动力有延迟
无法精确传递动力
不适合远距离传动
皮带速度过大或者突然加速会导致皮带断裂或打滑
下列选项中,不属于间歇运动机构的是?
槽轮机构
凸轮机构
棘轮机构
齿轮机构
静止在水平地面上的一台汽车,轮胎与地面产生哪种摩擦力?
静摩擦力
滚动摩擦力
滑动摩擦力
不产生摩擦力
关于曲柄摇杆及曲柄滑块,下列说法正确的是?
曲柄滑块机构只由曲柄及滑块两部分组成
曲柄滑块机构只能将直线往复运动转化为圆周运动
曲柄摇杆机构与曲柄滑块机构都包含连杆机构
曲柄摇杆机构只能将圆周运动转化为往复摆动
关于连杆机构,下列说法错误的是?
汽车发动机含有连杆机构
剪叉式升降机采用连杆机构
挖掘机机械臂采用连杆机构
骑自行车时大腿、小腿与自行车曲柄构成曲柄滑块机构
如下图所示,该机构为?

单动式棘轮机构
双动式棘轮机构
双向式棘轮机构
内啮合棘轮机构
关于前驱车,下列说法正确的是?
因为前驱车内部空间较大,所以大多数豪华车属于前驱车
动力系统效率高
起步加速表现好
重量分布更加均匀
中国的家用电压是多少伏?
110
380
500
220
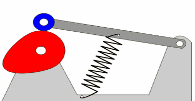
关于下图中的玩具,以下说法正确的是?

这个玩具为移动凸轮机构
这个玩具为平底从动件凸轮机构
这个玩具为摆动从动件凸轮机构
这个玩具将直线往复运动转化为圆周运动
关于凸轮机构,以下说法正确的是?
凸轮的转速决定从动件的运动规律
凸轮的轮廓曲线决定从动件运动的快慢
几何锁合凸轮机构利用特殊几何形状使凸轮和从动件始终保持接触
尖顶从动件一般只与盘形凸轮搭配
水力发电机是将( )能转化为( )能。
机械,电
热能,电
化学,电
风,化学
两艘船近距离并排航行着,两船中间的水流速度高于外侧,以下说法正确的是?
两艘船正常航行
两艘船逐渐靠近
两艘船逐渐远离
无法判断
以下不是连杆机构特点的是?
低副接触耐磨损
设计比较复杂
制造简单易于获得较高的制造精度
可以实现复杂的运动规律
()发明了测量路程用的“计里鼓车”,每走1里,击鼓1次,每走10里击钟一次。
东汉张衡
蜀国诸葛亮
春秋墨子
黄帝
意大利文艺复兴时期,()作为发明家发明了机器人、机械车、子母弹、坦克车、潜水艇、直升机等超越时代的装置。
达芬奇
米开朗琪罗
多纳泰罗
拉斐尔
双手合十想让双手之间产生滑动摩擦力必须具备哪些条件?
以下哪些属于力的三要素?
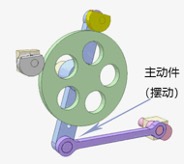
如下图所示,关于该机构说法正确的是?
链传动的特点有哪些?
以下机构或方法能将连续运动转化为间歇运动的是?
不完全齿轮机构属于间歇运动机构,主动件为完整齿轮。
火车站、飞机场处安检机利用皮带传动来运行李,属于交叉传动。
直升机飞上天空主要是因为,起飞时机翼下方气压比上方气压大。
电动机按照供电方式分为直流电动机和交流电动机。
1959年,乔治·德沃尔制造世界第一台工业机器人,他也被称为“工业机器人之父”。
皮带传动在突然变速时可以保护机械。
齿轮传动可根据齿轮的半径大小计算传动比。
2014年,在英国皇家学会举行的“2014图灵测试”大会上,聊天程序“尤金·古斯特曼”(Eugene Goostman)首次通过了图灵测试。
链传动动力传递过程中会产生延迟。
后驱车重心分布偏后。
